ロボットハンド(手首より先)やロボットアーム(腕の部分)は、どうやって人間の腕に似た動きをしているのでしょうか?
これらのロボットには、物をつかんだり、持ち上げたりするときに重要な役割をするサーボモーターと呼ばれるものが設置されています。
このサーボモーターは電気エネルギーを機械エネルギーに変換するとてもシンプルで便利なデバイスで、コストも低く、多くのクリエイティブなプロジェクトに使用できます。

ちなみに、私たちが子供の頃から工作でよく耳にするモーターは、DCモーターと呼ばれるもので、電池などの直流電源をつなげて、ただ直流電流を流して回転させるシンプルなモーターです。
ただし、DCモーターの目的は連続回転をつくりだすことであるため、正確な動きを実現するために使用されません。
一方、サーボモーターは異なり、ドライブシャフトの動きに対して正確なコントロールを可能にします。
そのため、プロジェクトで正確な動きを実現できるデバイスが必要な場合は、サーボモーターが使われることが多いようです。
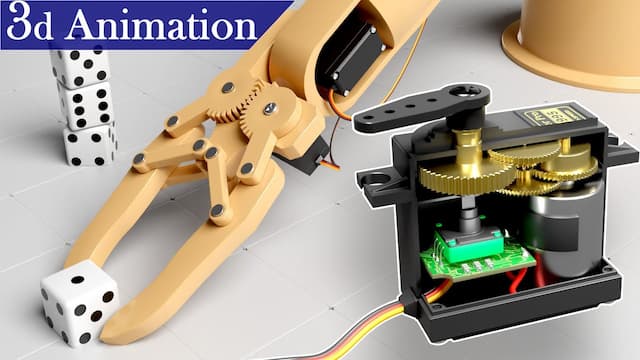
以下のビデオでは、ロボットアームの機械技術について、DCサーボモーターとは何かから私のように機械に詳しくない人でもイメージしやすいように画像で説明されています。

見ているだけでおもしろいのでぜひご覧ください。
How a DC servo motor works ? | detailed 3d Animation….